Aerobat - Bioinspired Morphing Robot
Project Aim
To validate dynamic morphing wing flight control strategies through experimental banking turn maneuvers, develop manufacturing-efficient print-in-place joint designs eliminating assembly complexity, and redesign electronics integration for improved structural protection and operational reliability in the Aerobat flapping wing platform.
Description
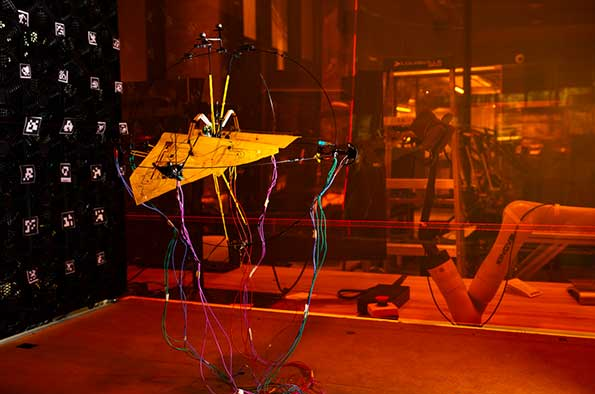
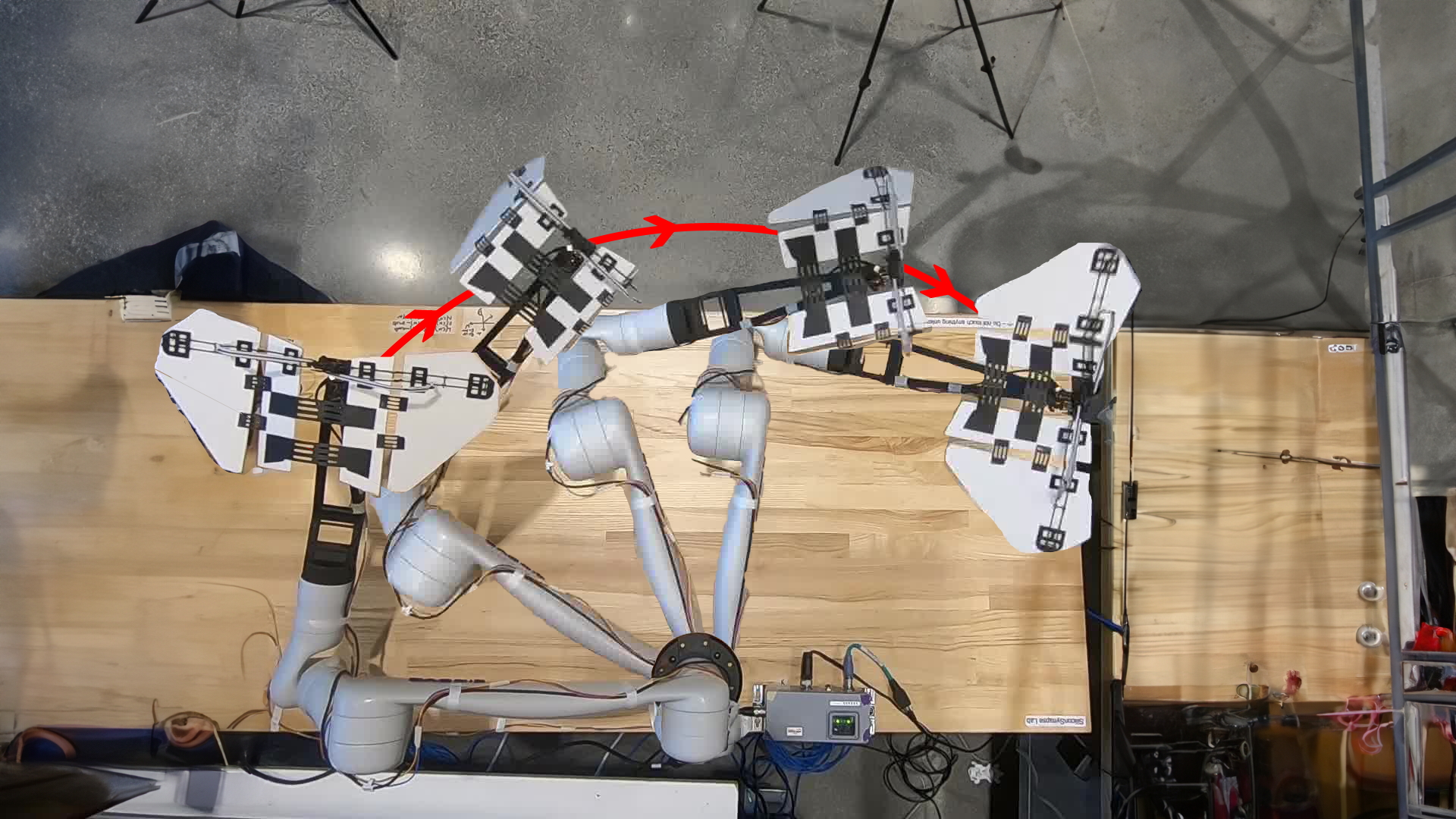
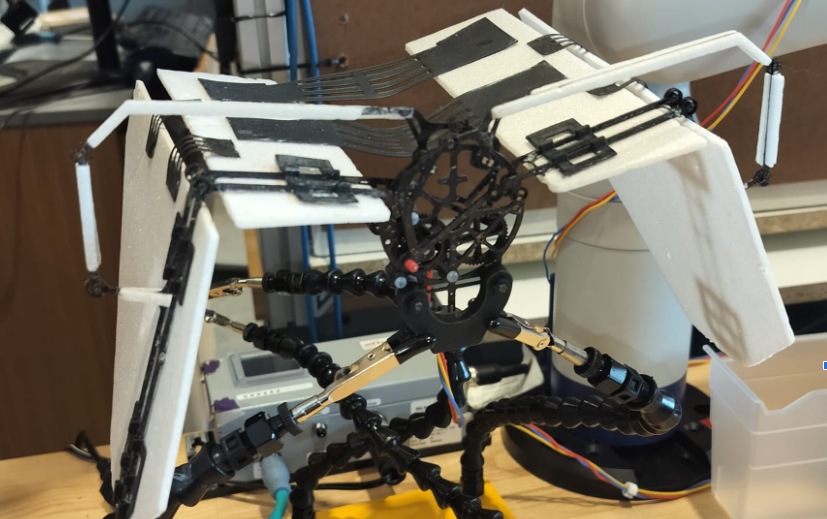
This work advances the Aerobat platform—a bioinspired flapping wing drone that challenges conventional fixed-geometry aerial robotics through dynamic morphing capabilities enabled by coordinated actuation of 14 distributed body joints. Unlike traditional flapping wing designs relying on open-loop stability and rigid wing structures, Aerobat integrates mechanical intelligence with closed-loop control, enabling real-time wing conformation adaptation to aerodynamic demands and environmental disturbances. The research validates that morphing-based flight control extends beyond terrestrial locomotion platforms, demonstrating that coordinated appendage reconfiguration and distributed low-power actuation enable flight modes impossible with conventional rigid-wing designs. The primary research contribution focused on experimental validation of banking turn dynamics achieved through structure response optimization. The innovative control strategy employs low-power primer actuators strategically distributed across the wing structure to produce significant flight control authority despite minimal actuation power and weight penalty. Banking maneuvers are executed by shifting structural response through coordinated joint motion, generating asymmetric lift distribution that induces controlled lateral acceleration without traditional control surfaces. Comprehensive experimental responsibilities included complete design and execution of physical flight tests in controlled indoor environments, development of data acquisition protocols capturing wing kinematics, body attitude, and flight trajectory simultaneously, systematic processing and refinement of high-frequency sensor data removing noise artifacts while preserving dynamic characteristics, generation of publication-quality comparative plots demonstrating banking performance across multiple actuation strategies, and meticulous trimming and synchronization of multi-source data streams for accurate correlation analysis.
The experimental validation confirmed that morphing-based control achieves sufficient authority for stable banking turns, validating the computational models and establishing practical feasibility of the approach for future autonomous flight applications. A parallel innovation stream pioneered the application of print-in-place (PIP) living hinge design to articulated wing structures, fundamentally transforming fabrication efficiency. Recognizing that traditional multi-part hinged assemblies required extensive post-print assembly, bearing installation, and precise alignment—processes consuming significant time and introducing potential failure points—the PIP living hinge concept exploits additive manufacturing overhang capabilities to fabricate fully functional revolute joints in a single print operation. The design methodology strategically positions compliant hinge geometries at precise angles relative to the print bed, enabling the printer to create clearance gaps and functional articulation without support material interference or assembly steps. This approach dramatically reduces component count, eliminates bearing-related failure modes, simplifies manufacturing workflows, and enables rapid iteration during design refinement. The living hinge concept validated in wing joint applications directly informed subsequent implementation in the Husky V3 ankle joint design, demonstrating transferability of manufacturing-enabled design principles across platforms. Additional contributions addressed critical electronics integration and structural protection requirements. The motor guard redesign prioritized impact resistance and aerodynamic efficiency, protecting brushless motors from collision damage during experimental flights while minimizing parasitic drag and mass penalties.
Electronics mounting refinements optimized component placement for center-of-mass management, improved wire routing preventing interference with moving wing structures, enhanced thermal dissipation for sustained operation, and simplified assembly and maintenance procedures. These practical improvements directly increased experimental throughput by reducing damage-related downtime and improving system reliability during high-frequency testing campaigns. The integrated contributions—experimental validation of morphing flight dynamics, manufacturing innovation through PIP joint design, and systematic electronics integration refinement—collectively advanced Aerobat from a conceptual platform toward a robust experimental system suitable for sustained research campaigns. The experimental banking turn validation established quantitative performance baselines for morphing-based control, the PIP living hinge design demonstrated manufacturing efficiency gains transferable to other articulated platforms, and the electronics redesign improved operational reliability essential for complex flight testing protocols. This work establishes Aerobat as a validated platform for continued investigation of bioinspired morphing flight, with demonstrated capability for dynamic maneuver execution and proven manufacturing strategies enabling rapid design iteration and platform evolution.