Portfolio

Husky V3 - MultiModal Quadruped
Project Aim
To experimentally validate morphing wing flight control through banking turn maneuvers, develop print-in-place joints eliminating assembly complexity, and redesign electronics integration for enhanced structural protection in the Aerobat flapping wing platform.
Summary
Husky V3 advances the multi-modal quadrupedal platform by addressing critical structural deficiencies found in Husky Carbon V2. Key innovations include a novel print-in-place (PIP) articulated ankle joint featuring optimized 33-degree conical geometry that eliminates post-print assembly and bearing installation while achieving 23-25 kg load capacity, custom bearing-embedded motor casings enabling integrated wire routing through designed channels within leg structures, and a refined torso architecture utilizing dual carbon fiber rods (12mm OD, 10mm ID, 1mm wall) achieving 20% mass reduction while eliminating torsional flexure. Iterative design refinement combined with systematic load testing validates robust performance across operational conditions. The platform demonstrates successful morphing between standing, crouching, morphed, and flying modes, establishing Husky V3 as a practical field-deployable system for advanced legged-aerial locomotion research.
Liquibot - Autonomous Bartending Robot
Project Aim
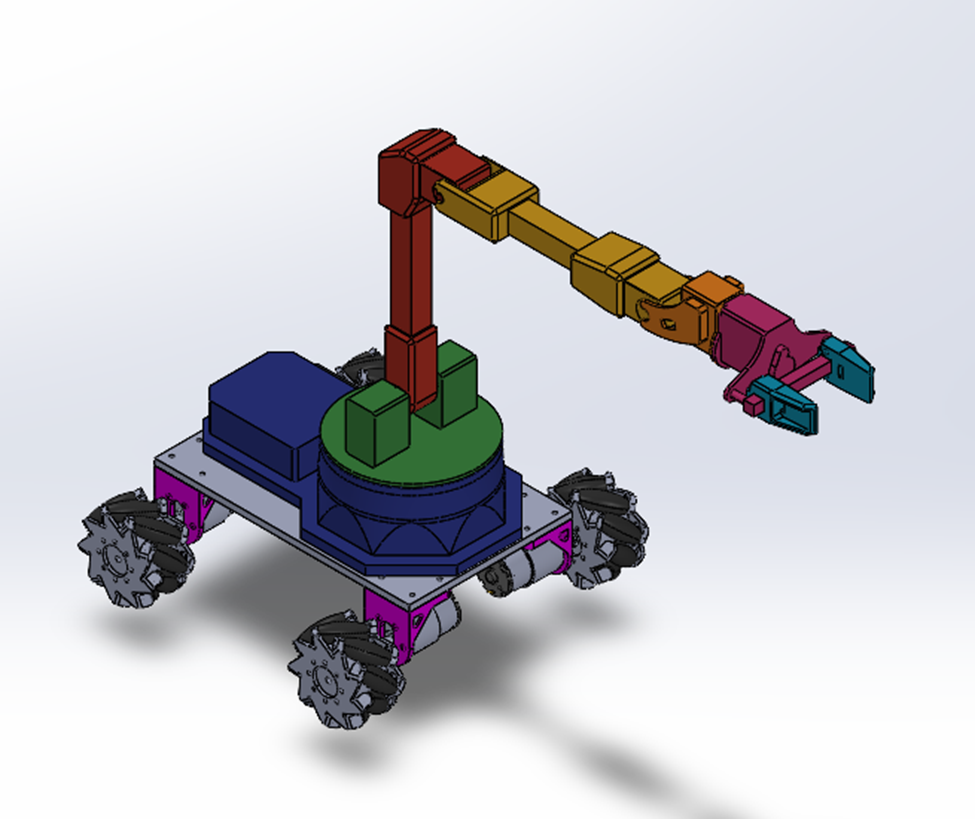
To design and develop an autonomous mobile platform integrating wheeled locomotion, robotic arm manipulation, and vision-based localization for automated bartending operations including container grasping, transport, and shaking motions.
Summary
Liquibot is an autonomous mobile manipulator designed for bartending applications, combining custom chassis design with integrated robotic arm control and vision-based navigation. The platform features scratch-built mechanical chassis integrating electronics and structural components, custom-designed gripper capable of grasping cylindrical containers and glasses, remote operation via Bluetooth-enabled gamepad interface translating inputs to PWM wheel control, ROS-based robotic arm trajectory planning enabling pick-and-place operations, and ORB-SLAM 3 integration with AprilTag detection for precise spatial localization. The system successfully manages 9lb operational weight while maintaining smooth locomotion and coordinated manipulation, demonstrating practical feasibility of mobile bartending automation.
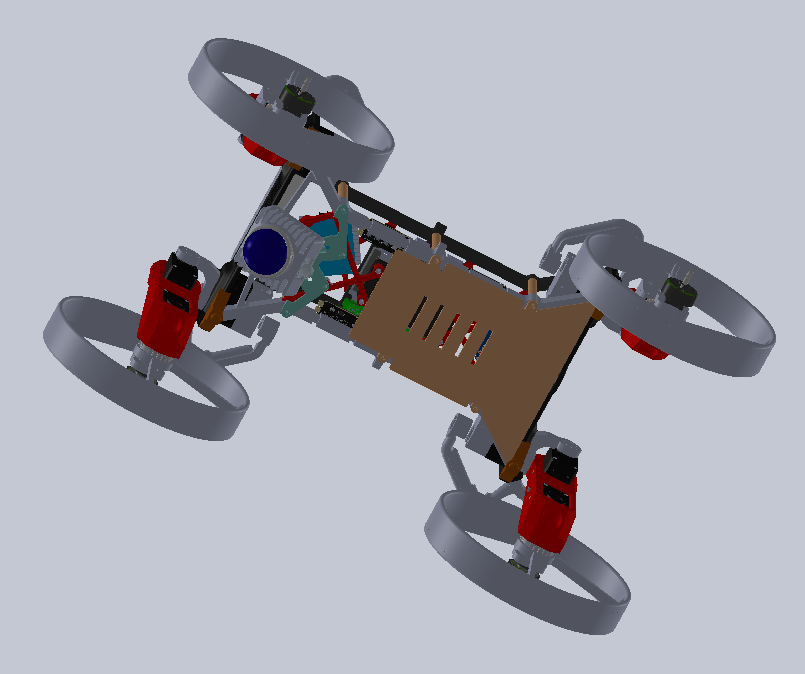
M4 - Multi-Modal Mobility Morphobot
Project Aim
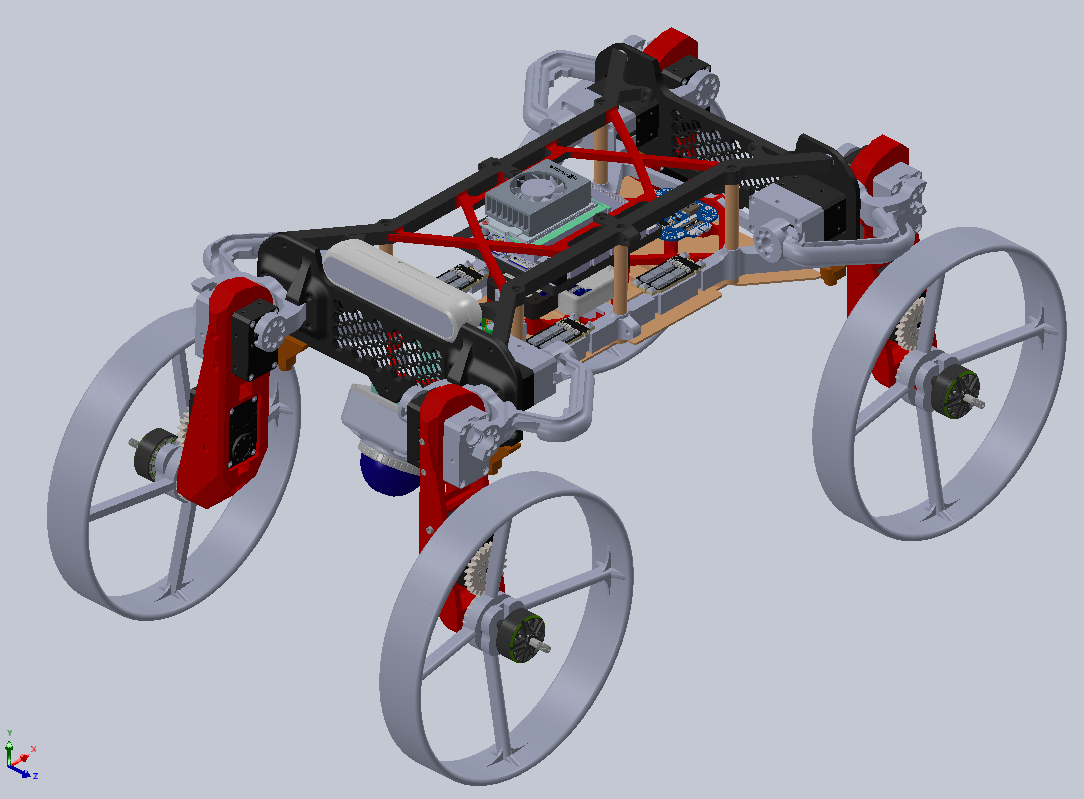
To redesign the chassis architecture for improved structural integration, incorporate Livox LiDAR for enhanced environmental perception, develop retractable landing gear systems, and refine overall assembly workflow and aesthetic presentation for the M4 morphobot platform.
Summary
M4 (Multi-Modal Mobility Morphobot) represents a paradigm shift in adaptive robotics where appendage repurposing enables locomotion plasticity without mechanical reconfiguration. Building on the platform introduced in Nature Communications, contributions focused on comprehensive chassis redesign optimizing component integration and structural efficiency, Livox LiDAR integration providing high-resolution 3D perception for autonomous navigation, retractable landing gear development protecting underside components during ground operations while retracting for aerial transitions, complete system assembly validating mechanical interfaces and operational workflows, and aesthetic refinement achieving professional presentation suitable for demonstration and publication.
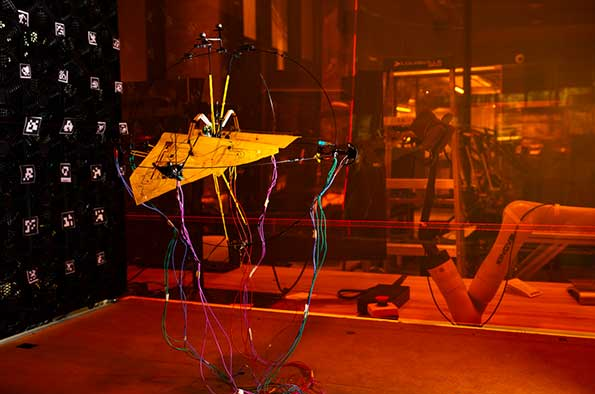
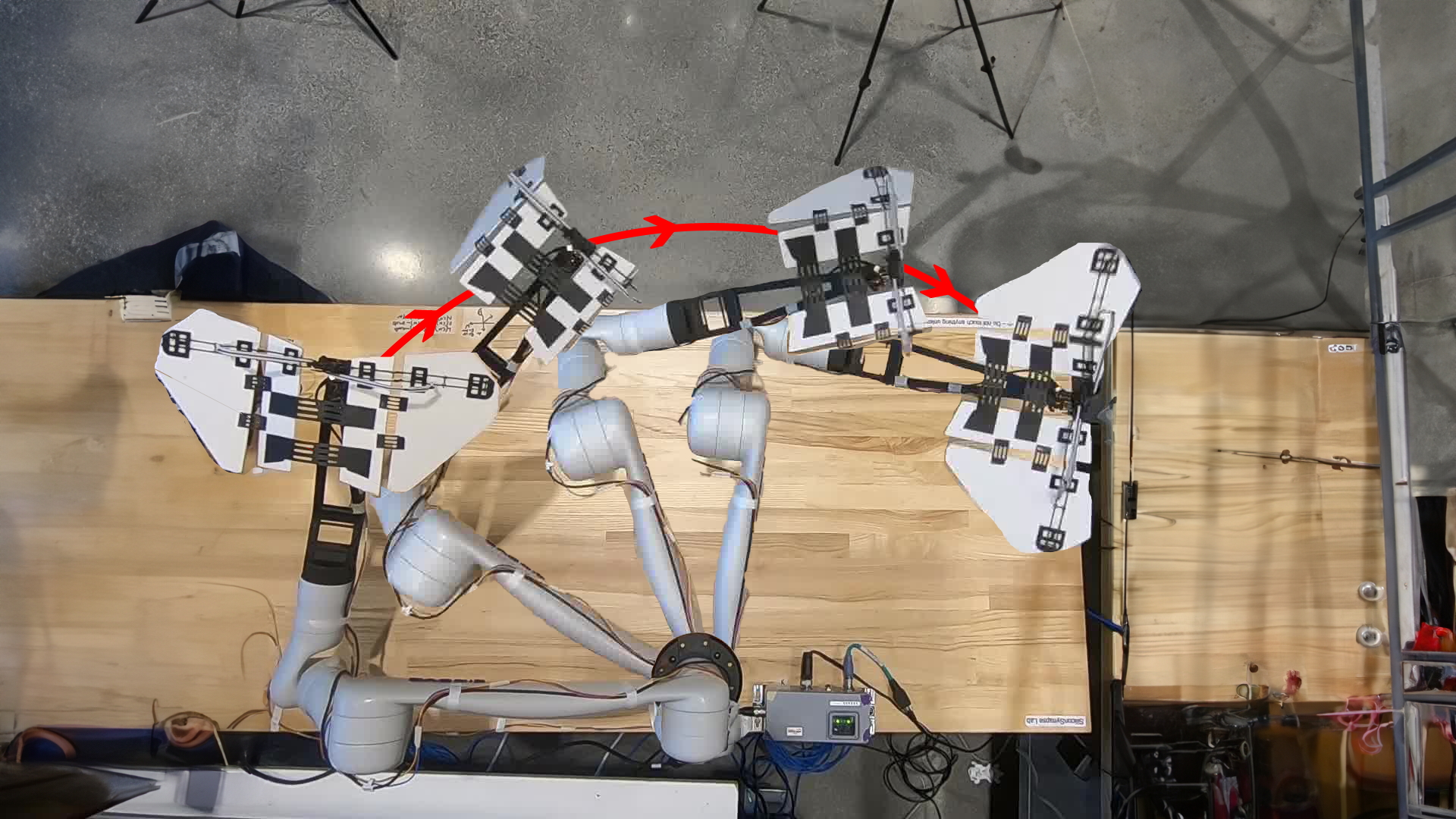
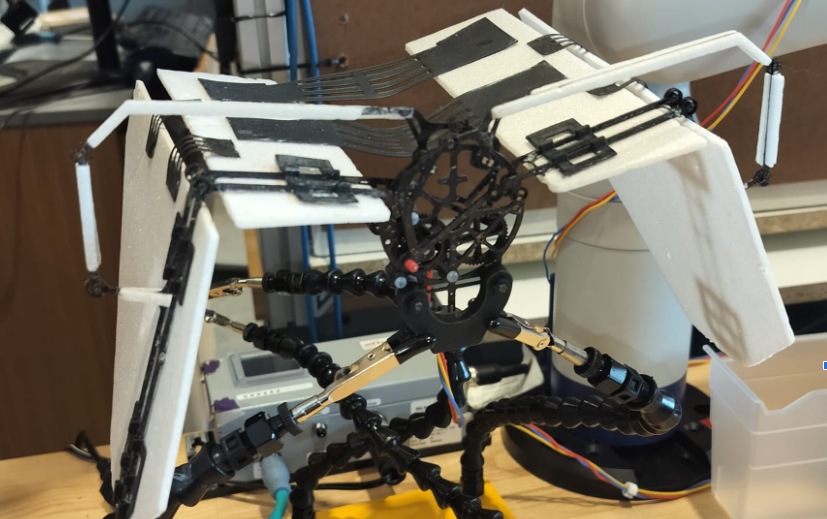
Aerobat - Bioinspired Morphing Robot
Project Aim
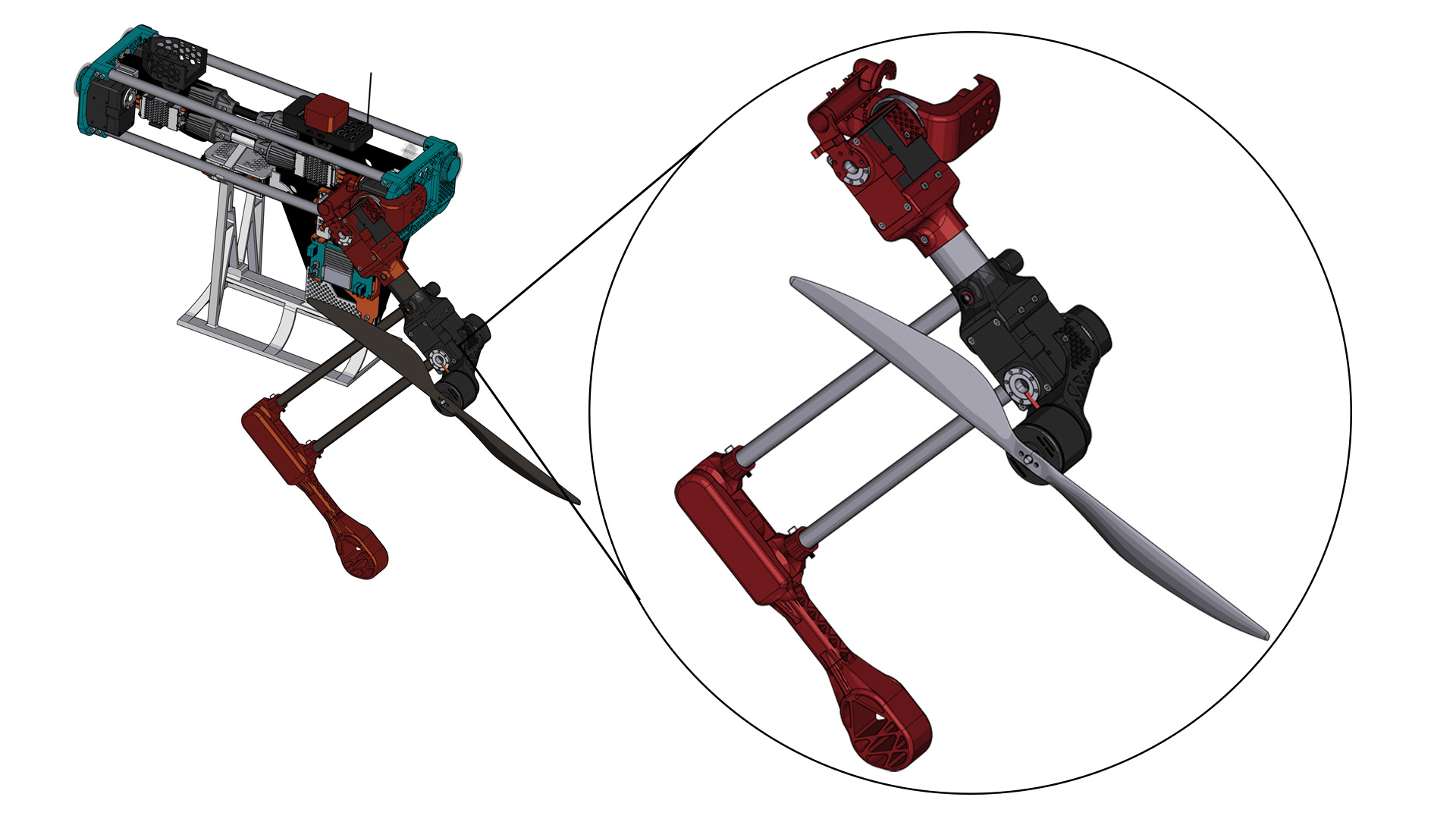
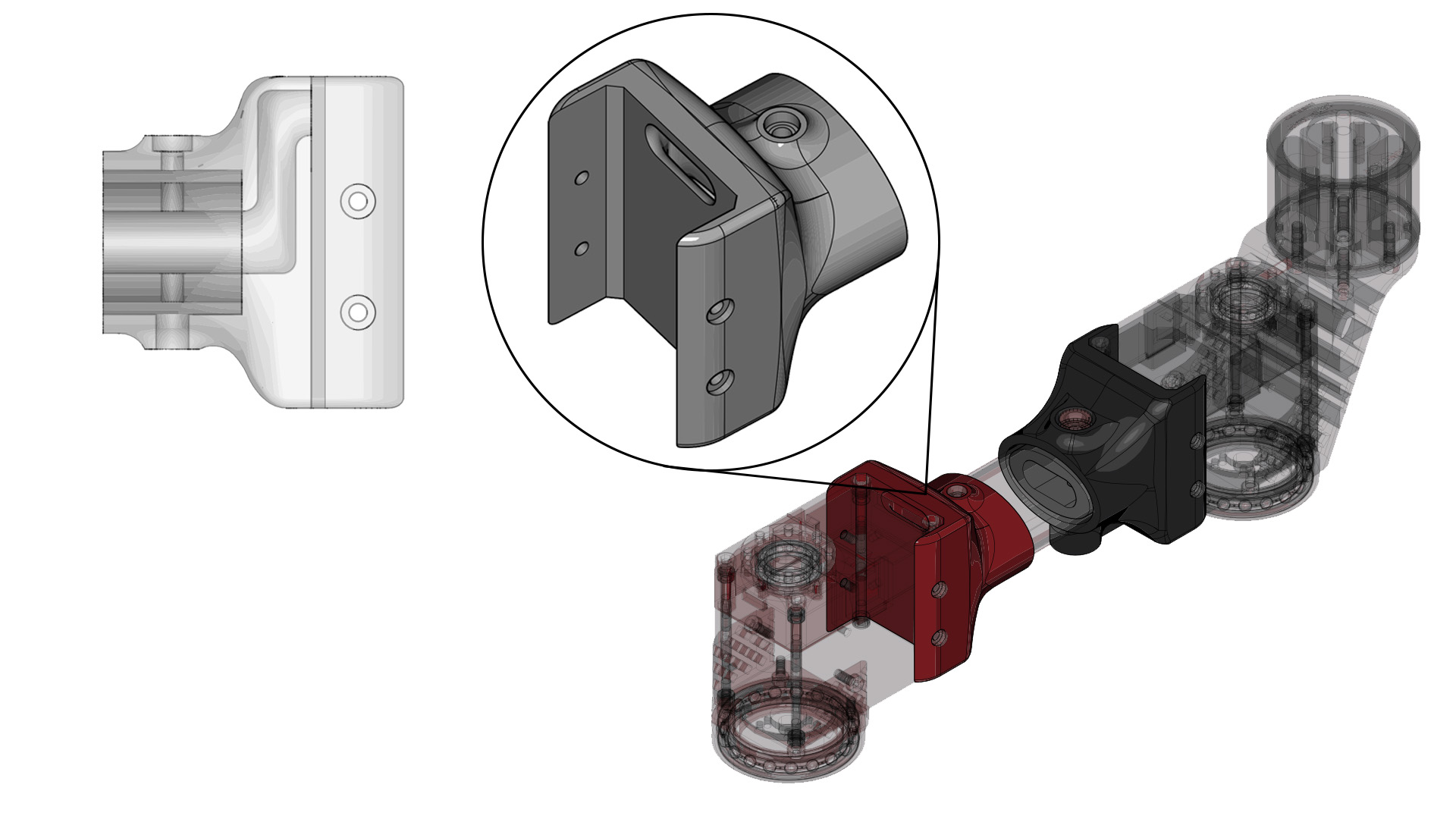
To validate dynamic morphing wing flight control strategies through experimental banking turn maneuvers, develop manufacturing-efficient print-in-place joint designs eliminating assembly complexity, and redesign electronics integration for improved structural protection and operational reliability in the Aerobat flapping wing platform.
Summary
Aerobat is a bioinspired tail-less flapping wing drone featuring 14 body joints that enable dynamic wing morphing for flight control. Contributions span three critical areas: experimental validation of banking turn maneuvers achieved through structure response optimization where coordinated low-power primer actuation shifts wing geometry to generate controlled lateral forces, pioneering print-in-place (PIP) living hinge joint design exploiting 3D printer overhang capabilities to create functional articulated joints without post-print assembly, and comprehensive electronics redesign including protective motor guards and optimized component mounting improving system robustness. Experimental work involved complete physical test execution, high-fidelity data acquisition and processing, and systematic refinement of flight data for comparative analysis validating morphing-based control authority in untethered flight conditions.
Sense Dial - Smartwatch for Blind
Project Aim
To develop an accessible smartwatch with tactile feedback and navigation assistance for visually impaired users.
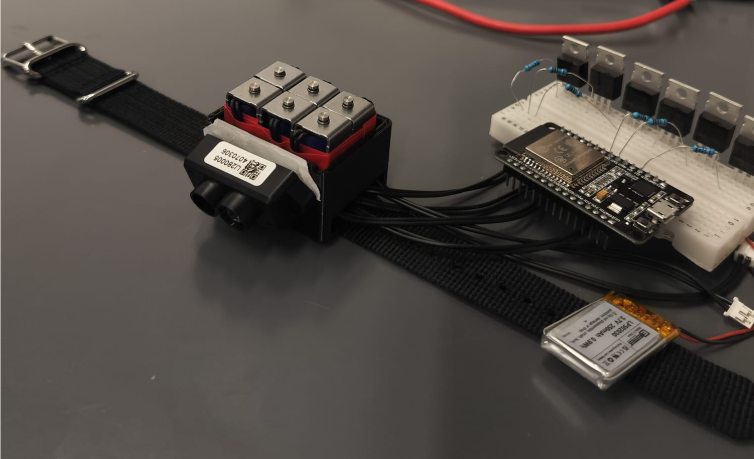
Summary
This assistive technology device integrates a TF-mini S Lidar for sensing and collision avoidance, with a refreshable Braille display created using 6x12 DC solenoid actuators. The system includes multiple alert mechanisms including push button for SOS, vibration motor, and audio buzzer. The prototyping involved implementing MOSFET-based switching circuits to drive the solenoid actuators, as microcontroller pins couldn't provide sufficient current for direct actuation.
Virtual Painter - Mediapipe
Project Aim
To create an intuitive hand gesture-based digital painting interface using computer vision.
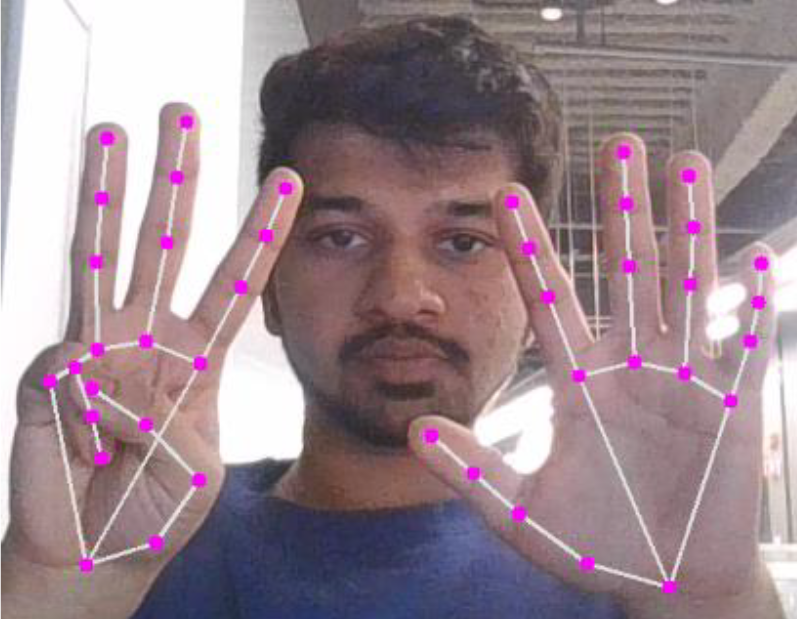
Summary
This application integrates hand gesture recognition with real-time drawing capabilities using OpenCV and MediaPipe frameworks. Users can draw, erase, take screenshots, and clear the canvas through natural hand movements on live video feeds. The system features multiple modes including draw mode, erase mode, and settings mode for customizing tip size, eraser size, and color selection, providing an intuitive and immersive digital creation experience.
Foot Pressure Measuring System
Project Aim
To design a pressure sensing unit which gives values of the pressure applied on different areas of the foot using multiple sensors.
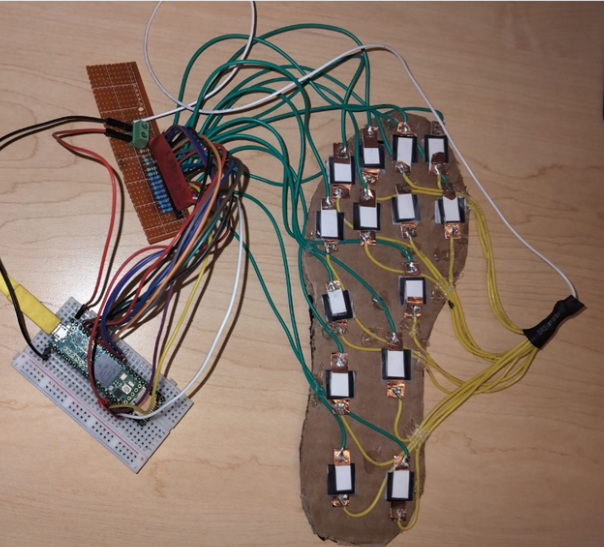
Summary
Developed custom Velostat-based pressure sensors through experimental optimization of size, orientation, and thickness (finalized at 0.1mm). The sensors utilize conducting copper strips with plastic insulation to prevent interference from static currents. A simple voltage divider circuit with 1k ohm resistor enables pressure measurement. Two testing approaches were implemented: array matrix and multi-channel configurations. The final design employs multi-channel sensors with pressure data visualized in a sole-shaped plot for intuitive pressure distribution analysis.
Turtle-Bot with Lidar & Real-time Mapping
Project Aim
To implement gmapping SLAM algorithms with a TURTLEBOT3 using Raspberry Pi and Lidar sensor.
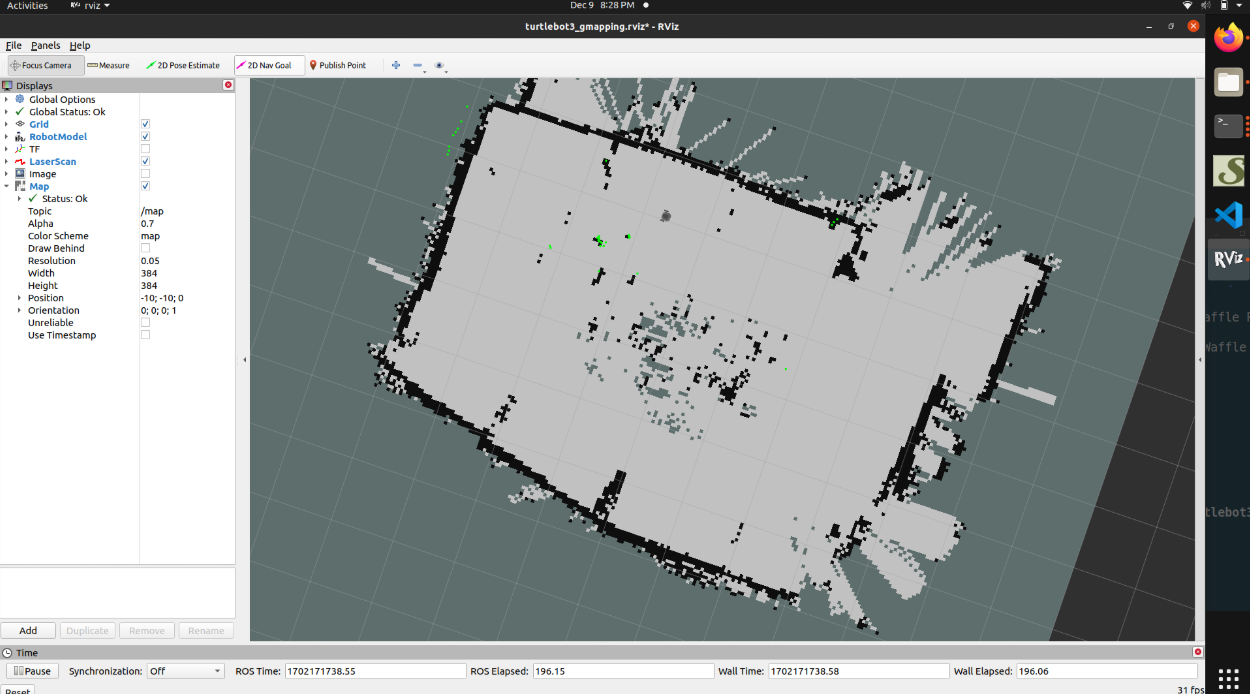
Summary
Configured a TurtleBot3 platform with Raspberry Pi 3B+, SBC controller board, and Lidar sensor for autonomous mapping. The ROS environment was set up to handle motion control, data extraction, and Lidar data publishing. Implemented Gmapping SLAM algorithm using ROS drivers to process real-time sensor data and generate accurate 2D maps of the surrounding environment, enabling autonomous navigation and localization.