Husky V3 - MultiModal Quadruped

Project Aim
To experimentally validate morphing wing flight control through banking turn maneuvers, develop print-in-place joints eliminating assembly complexity, and redesign electronics integration for enhanced structural protection in the Aerobat flapping wing platform.
Description
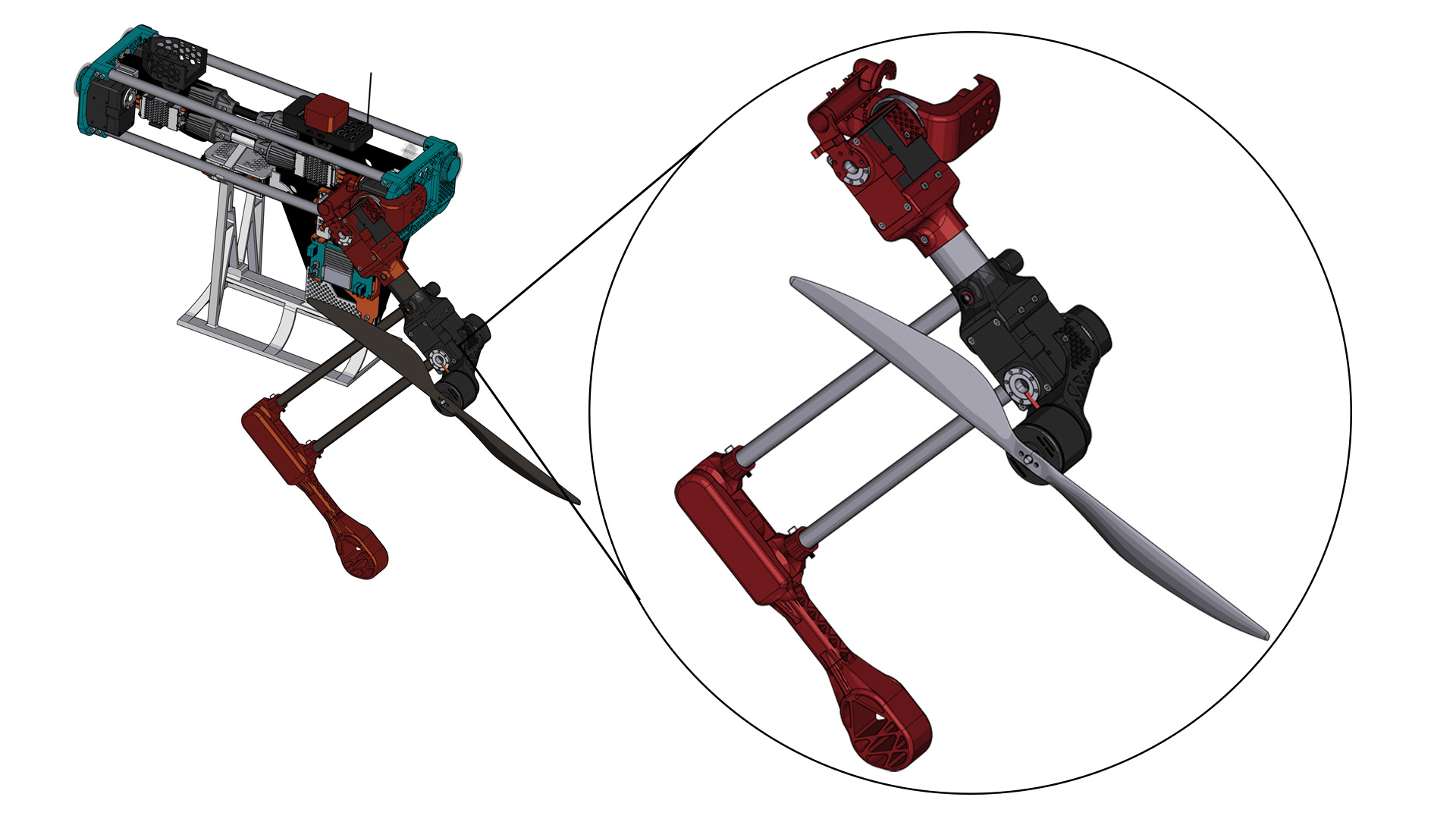
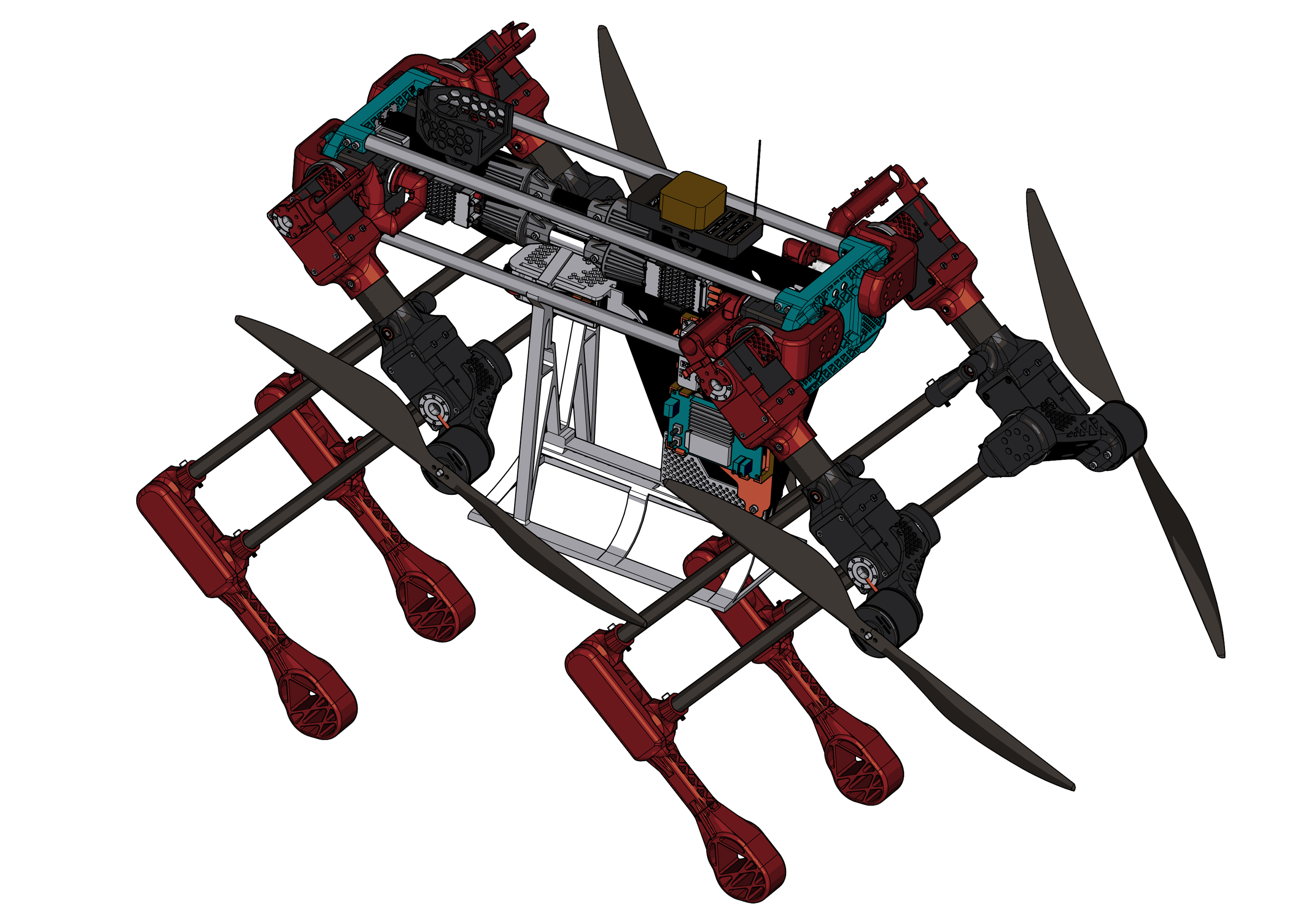
This thesis presents the comprehensive mechanical design, fabrication, assembly, and experimental validation of Husky V3—a significantly advanced iteration of the Husky robot family addressing fundamental limitations in hybrid ground-aerial robotics. Building upon Harpy's thruster-assisted bipedal platform and M4's wheeled morphing architecture, Husky V3 extends appendage repurposing to quadrupedal systems where coordinated thrust modulation and posture control enable dynamic transitions between terrestrial walking and autonomous flight. The research directly confronts critical structural and compliance deficiencies identified in Husky Carbon V2, where excessive torso and link flexion compromised walking stability and flight control safety, rendering the platform unsuitable for field deployment. The design methodology prioritized three interdependent objectives through systematic iterative refinement: achieving structural rigidity to eliminate torsional flexure during dynamic locomotion, reducing system mass by 20% (from 6.7kg to 5.36kg) to improve thrust-to-weight ratio for enhanced aerial performance, and integrating seamless wire routing within structural frameworks for operational safety and professional presentation. A comprehensive initial design review protocol systematically evaluated general leg architecture, leg-specific assemblies (Legs 1-4), and torso subsystems, documenting structural deficiencies including inadequate femur connector clamping geometry, bearing retention failures, fastener standardization inconsistencies, and torso torsional compliance. Key mechanical innovations represent advances in both design methodology and manufacturing strategy. The novel print-in-place (PIP) articulated ankle joint featuring optimized conical geometry with 33-degree slopes exploits additive manufacturing overhang capabilities, enabling direct fabrication of complex multi-axis articulation without post-print assembly or bearing installation. Load testing validated ankle performance exceeding 23-25 kg across multiple loading orientations while maintaining compliance through repeated cycles, with dual revolute joint configuration effectively distributing torsional loads.
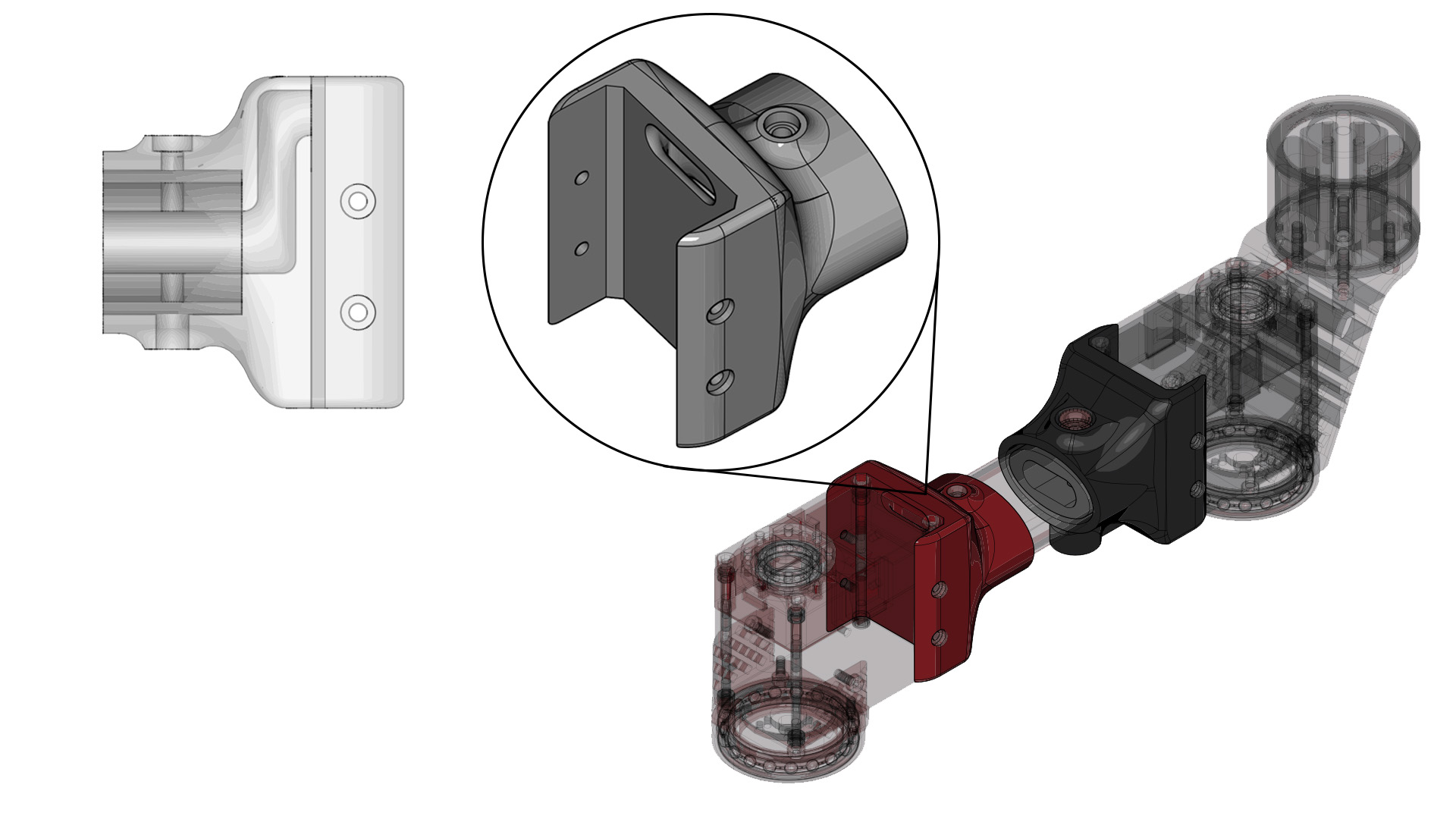
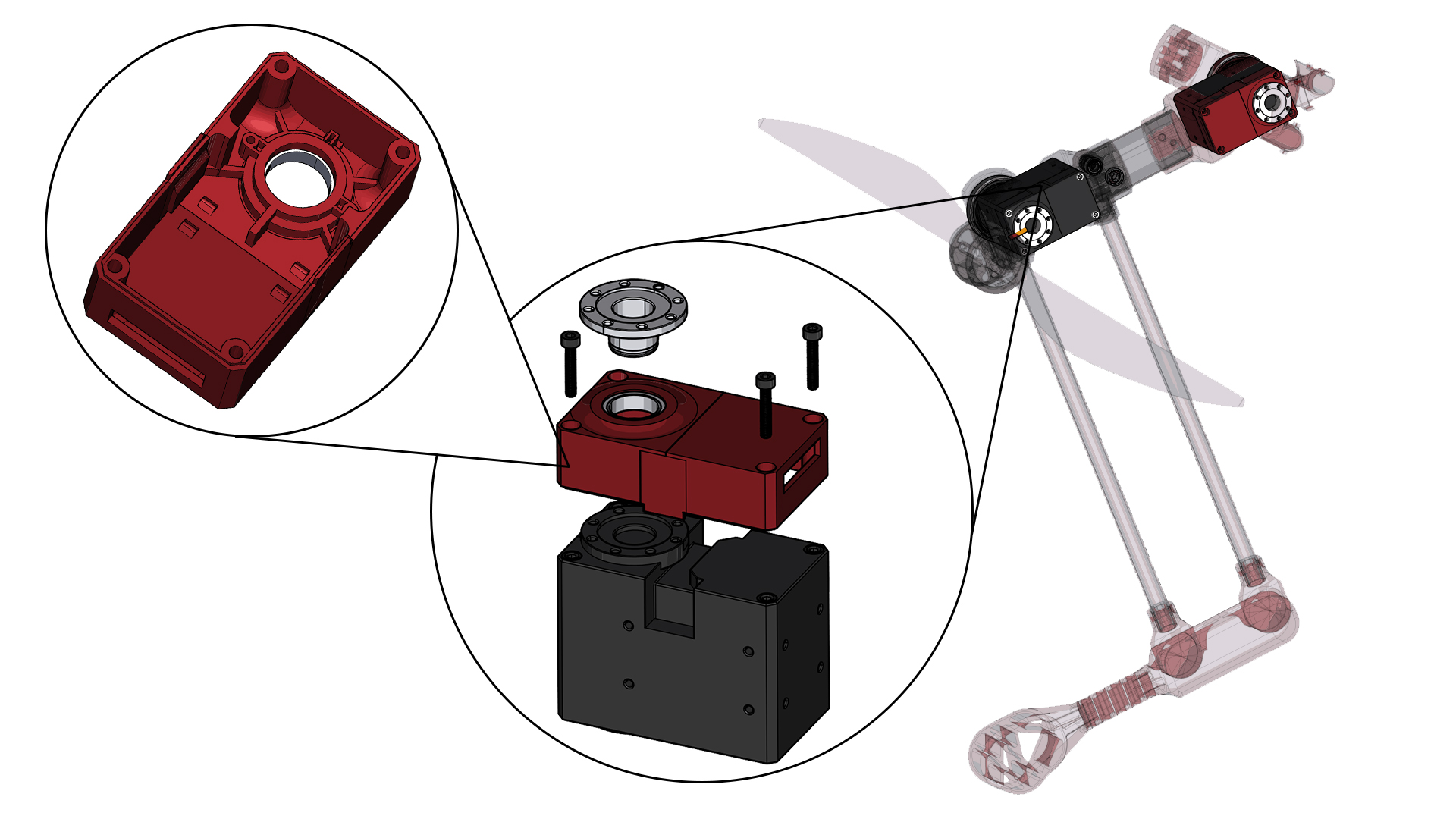
Beyond ankle innovation, systematic component redesign addressed specific failure modes: femur connectors received optimized clamping geometry enhancing bearing retention, hip bone assemblies transitioned from Y-grip to L-shaped C-grip configuration reducing mass by 7 grams while improving bearing capture, and custom bearing-embedded motor casings facilitate integrated 16-gauge wire routing through pause-and-embed fabrication techniques. Torso architecture underwent substantial structural evolution, incorporating dual carbon fiber rods with optimized diameter-to-thickness ratios achieving significant mass reduction while eliminating flexion that previously compromised flight stability. Pelvis plate redesign integrated body tubes directly into structural geometry with dual-contact enclosure creating fully-constrained load paths, converting the cross member from floating design to direct plate-to-plate fastening establishing continuous torsional resistance. Wire routing architecture begins at knee BLDC motors, travels through motor casing internally, continues through designed channels in knee distal connectors to hip sagittal motors, exits through dedicated routing pipelines parallel to sagittal motors, enters hip frontal motor passive sides protecting cables from propeller contact and motor interference. ESC mounting brackets received lightweight snap-fit redesign improving thermal management and reducing electromagnetic interference. Experimental validation established Husky V3 as a robust platform suitable for field deployment. Systematic load testing validated component performance: hip connector sustained 10kg without structural degradation demonstrating linear load response, femur connector exceeded 18 kgf regardless of printing orientation validating manufacturing flexibility, and ankle living hinges maintained compliance properties through repeated loading cycles. Operational field testing demonstrated successful morphing sequences transitioning between standing, crouching, morphed, and flying configurations in approximately 1 second, with tethered trotting validating 0.4-second gait cycles and untethered flight tests confirming stable aerial control.
Mass analysis revealed 20% reduction compared to Husky V2 through component optimization, PIP joint integration eliminating multi-part assemblies, and strategic carbon fiber selection. This work establishes clear design principles for manufacturing-enabled morphing platforms: intelligent exploitation of additive manufacturing capabilities can simultaneously achieve structural performance, assembly simplicity, and operational reliability when combined with systematic load-based validation. The bearing-embedding methodology utilizing print-pause-insert-resume sequences enables integration of standard components within 3D-printed structures without compromising geometric tolerances. Fastener standardization reduces assembly complexity and component inventory while ensuring consistent mechanical properties across subsystems. The comprehensive documentation of design decisions, iterative refinement processes, material selection strategies, and operational validation results provides a practical roadmap for future development of Husky V4 and informs broader research in legged-aerial robotic systems, advancing the state-of-the-art in multi-modal locomotion platforms for dynamic environment exploration, search-and-rescue operations, and autonomous field research.