About Me
I am a Researcher and Design Engineer specializing in electro-mechanical systems from concept to real-world deployment. I excel at solving complex engineering challenges at the intersection of mechanical design, embedded systems, and robotics. My expertise spans actuator systems, custom power electronics, advanced manufacturing including additive manufacturing and metalworking, and programming in Python, C++, and ROS/ROS2. Certified in SolidWorks (CSWA and CSWP), I leverage hands-on innovation and rapid prototyping to engineer transformable robots, lightweight UAVs, and precision control systems. My published research in IEEE AIM demonstrates my commitment to advancing robotics and delivering robust, performance-driven solutions.
Download Resume
Languages:
Python, C, C++, Embedded C, MATLAB, XML, HTML, ROS, ROS2
Frameworks:
URDF, Tensor, OpenCV, PyTorch, SLAM, Computer Vision
Soft Skills:
Strong communication and Interpersonal skills, Team handling, Problem Solving
Microcontrollers:
Teensy, Arduino, Esp32, Raspberry Pi
Platforms:
SolidWorks (CSWA & CSWP), Fusion360, Gazebo, VS Code, AutoCAD, LabView, EasyEDA (PCB Designing), LTspice, Ni Multisim, Dip Trace
Laboratory:
Lazer Cutting, 3D printing (SLA & FDM), Woodworks, SMD Soldering, Metalworks
Education
Northeastern University, Boston, MA
Master of Science in Robotics | Con. Electrical and Computer Engineering
Sept. 2023 – Dec. 2025
GPA 3.53/4.0
Coursework: Robotics Sensing and Navigation, Assistive Robotics, Pattern Recognition and Computer Vision, Robot Mechanics
NMIMS University, Mumbai, India
Bachelor of Technology in Mechatronics
Jul. 2020 – May 2023
GPA 3.45/4.0
Coursework: Robotic System Design, Mechatronic Systems, Fluid Power Automation, CAD/CAM, VI
Work Experience
Research Assistant | Silicon Synapse Lab
Boston, MA | Dec. 2023 – Dec. 2025
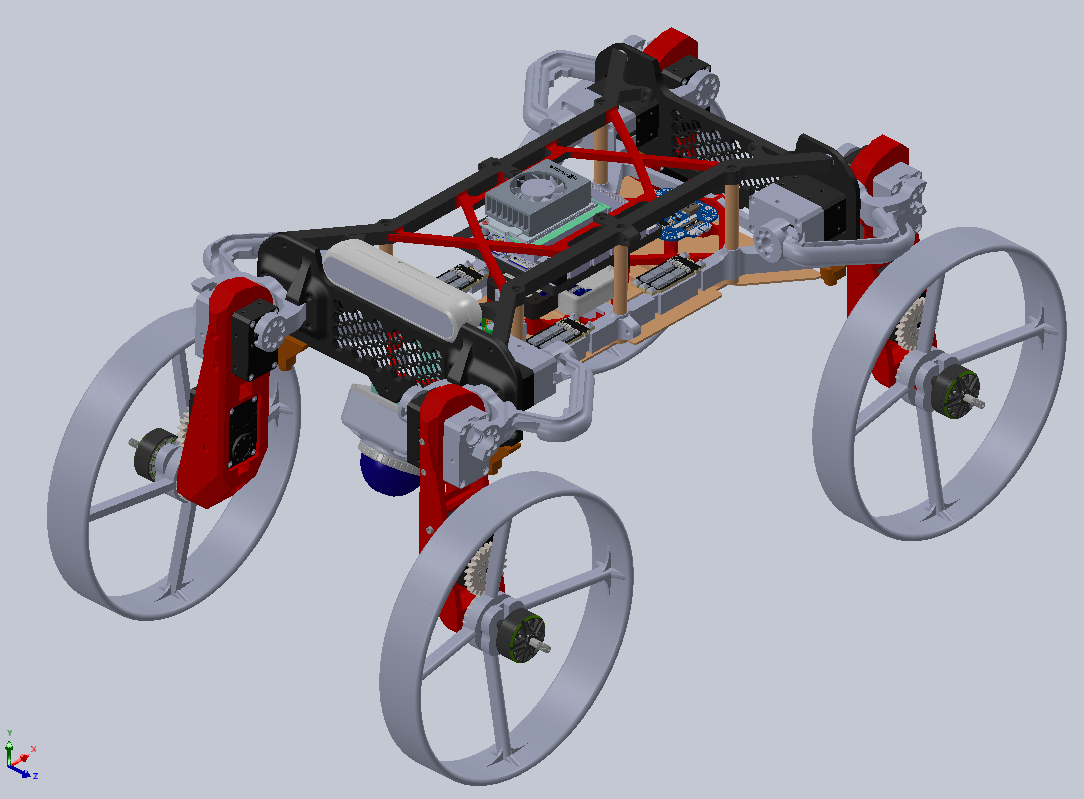
- • Architected 90% of Husky V3 quadruped-to-UAV transformable robot components, introducing hollow tube torso architecture that reduced pitch twist by 50% and cut 3D-printed assemblies threefold, enabling efficient multimodal path planning across quadruped and flight modes
- • Configured dual-contact hollow tube hip and upper leg connections, optimizing moment arm positioning to reduce actuator torque, enhance load capacity, secure gripper engagement, streamline wire routing, and improve flight safety margins
- • Developed and tested Print-in-Place (PIP) revolute joint mechanism using dual-material 3D-printed living hinges, eliminating post-assembly operations and enabling monolithic joint modules for rapid design iteration and modular reconfiguration
Electrical Engineer Intern | Festo Corporation
Mumbai, India | Jan 2023 – Aug 2023
- • Fabricated TEC PCB from schematic through SMD assembly and validation, enabling dew point control for industrial air cooling subsystems
- • Implemented solenoid valve driver circuit, achieving 3ms response time and 85% power efficiency for precision 2bar air flow control
- • Validated PID-based PWM controller across various temperature sensors, achieving ±1.5°C accuracy within 300ms settling time for stable thermoelectric cooling operation
Research and Development Intern | Panache Digilife Limited
Mumbai, India | May 2022 – Jun 2022
- • Prototyped SCARA robot-based automatic screwing system for laptop assembly, automating M2-M5 fastener screwing
- • Demonstrated 30% production efficiency improvement and 20% monthly labor cost reduction through automated torque-controlled screwing mechanism, validated via prototype testing across multiple fastener configurations and assembly scenarios
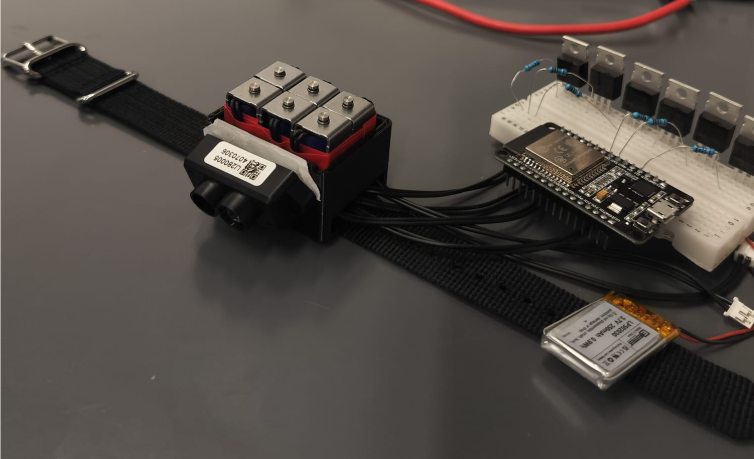
Featured Projects
Below are some of my projects :

Check out my complete portfolio for more projects
PORTFOLIOContact Me
Below are the details to reach out to me!