M4 - Multi-Modal Mobility Morphobot
Project Aim
To redesign the chassis architecture for improved structural integration, incorporate Livox LiDAR for enhanced environmental perception, develop retractable landing gear systems, and refine overall assembly workflow and aesthetic presentation for the M4 morphobot platform.
Description
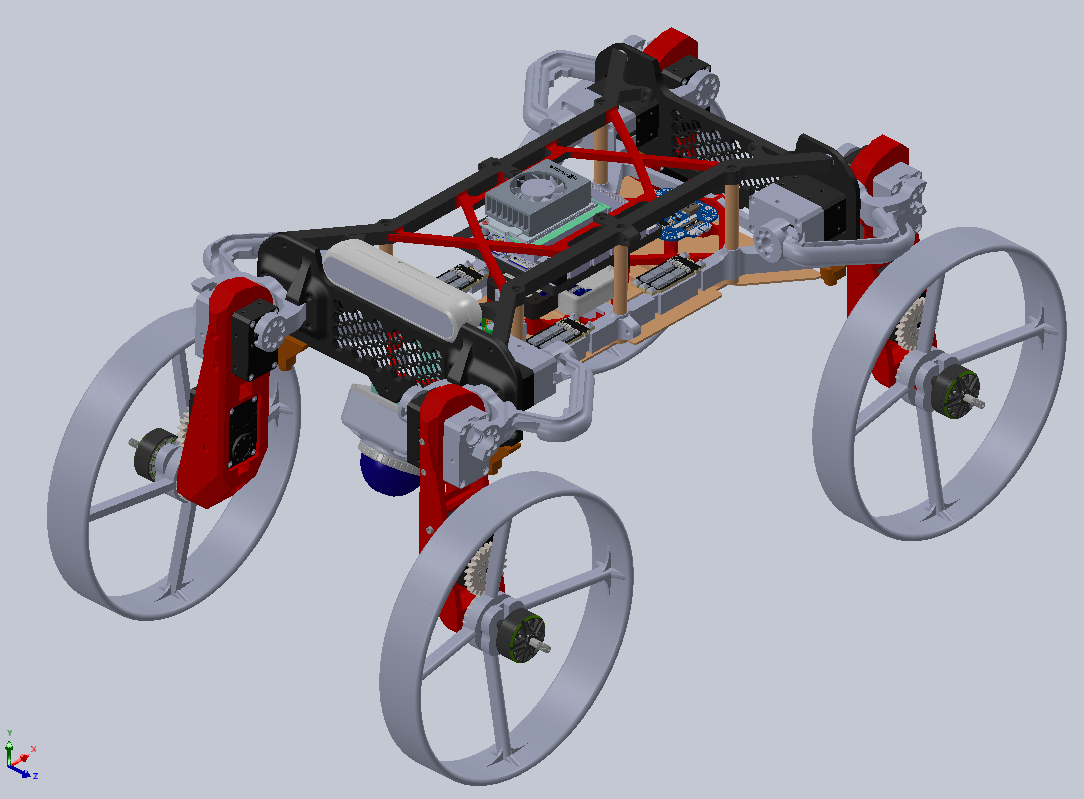
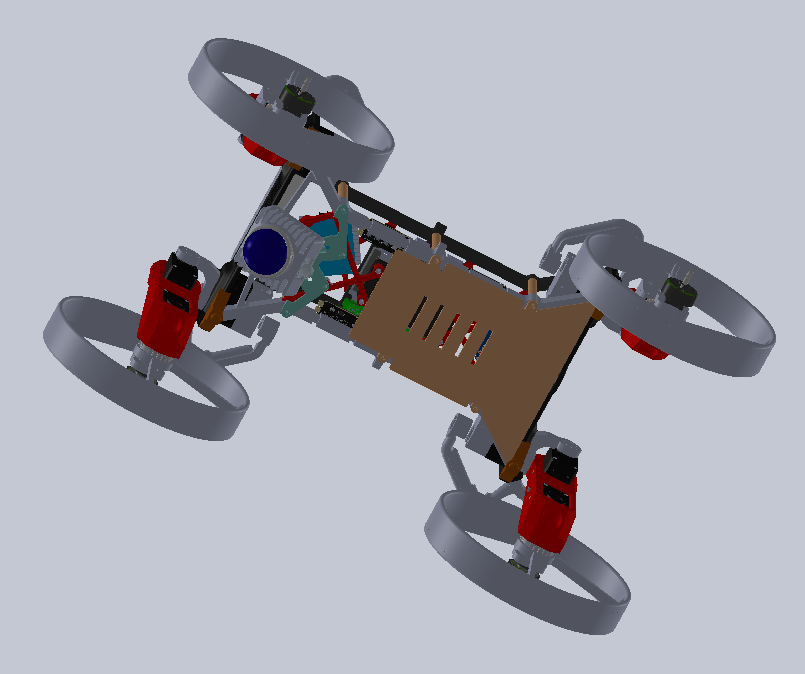
The M4 (Multi-Modal Mobility Morphobot) platform, published in Nature Communications, demonstrates locomotion plasticity through intelligent thruster reallocation rather than mechanical reconfiguration. Unlike traditional single-mode robots, M4 dynamically transitions between wheeled ground mobility, autonomous flight, and hybrid trotting gaits by strategically modulating thrust vector direction and magnitude. This work advanced the physical platform through comprehensive mechanical redesign and system integration, transforming the conceptual design into a robust field-deployable system. The chassis redesign addressed structural integration challenges identified during initial prototyping. The refined architecture optimized component mounting locations for balanced mass distribution, integrated wire routing channels protecting cables during multi-modal transitions, incorporated mounting interfaces for expanded sensor payloads without compromising structural integrity, and utilized lightweight materials achieving rigidity targets while minimizing overall system mass.
Design iterations employed CAD-based stress analysis validating load paths during worst-case operational scenarios including hard landings, high-speed ground impacts, and rapid mode transitions. Livox LiDAR integration represented a critical advancement in perception capabilities, enabling autonomous navigation across complex environments. The integration required custom mounting bracket design positioning the sensor for optimal field-of-view coverage during both ground and aerial operations, vibration isolation preventing motion-induced noise in point cloud data, thermal management ensuring sensor reliability during sustained operation, and electrical integration with the onboard computing stack for real-time processing. The LiDAR system provides high-resolution 3D environmental mapping essential for terrain-aware path planning and obstacle avoidance during autonomous multi-modal locomotion. Retractable landing gear development protected underside components during ground operations while maintaining aerodynamic efficiency during flight. The mechanism design prioritized lightweight actuation enabling rapid deployment and retraction synchronized with mode transitions, robust impact absorption during landing protecting chassis-mounted electronics, minimal stowed volume preserving ground clearance for wheeled locomotion, and fail-safe deployment ensuring safe emergency landings.
Load testing validated landing gear performance across impact energies representative of operational flight profiles. System assembly responsibilities encompassed complete mechanical integration validating all interfaces, systematic wire routing following designed pathways, sensor calibration and alignment verification, and comprehensive system checkout confirming operational readiness. Aesthetic refinement involved component arrangement optimization for visual coherence, protective covering design concealing internal complexity while maintaining thermal dissipation, professional color coordination across subsystems, and cable management achieving clean external presentation suitable for demonstration environments and publication photography. These contributions collectively transformed M4 from a research prototype into a polished platform demonstrating the practical feasibility of appendage repurposing for multi-modal locomotion. The refined chassis provides robust structural foundation for continued research, Livox LiDAR enables autonomous operation in unstructured environments, landing gear protects critical components during dynamic operations, and professional presentation effectively communicates the platform's capabilities to broader audiences, advancing the state-of-the-art in adaptive mobile robotics.